09 Jan 2019
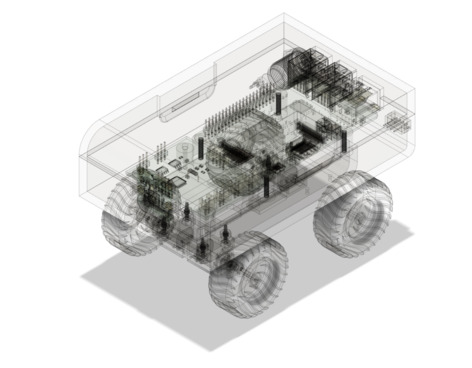
I have been thinking of creating a small mobile robot from scratch. From scratch means, go through all the steps of a product development. Design the overall architecture, design the circuits, make 3D model of the parts, 3D print the parts and finally integrate with ROS.