
13 Nov 2015

This is a demonstration of AR Drone 2.0 simulation under gazebo using tum_simulator on ROS Indigo. This video is a part of an autonomous landing of AR Drone project.
EIONI

This is a demonstration of AR Drone 2.0 simulation under gazebo using tum_simulator on ROS Indigo. This video is a part of an autonomous landing of AR Drone project.
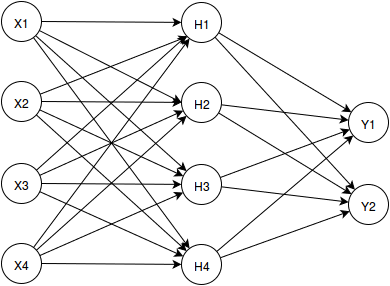
This is an obstacle avoiding robot which I and Sooraj Krishna built in ROS using STDR simulator. The robot is making decision based on a 3 layer Neural Network. The learning algorithm used is back-propagation (which we wrote in python). The network design is shown below.

This is a sample program I wrote to learn ROS. I have used linux joystick api to directly capture values of the analog stick of my joystick (F710 Wireless Gamepad). These data are then directly send to the turtlesim/cmd_velocity as a geometry_msgs/Twist type.